
Past Research Projects
Autonomous Surveying of Plantation Forests using Multi-Rotor UAVs

PhD Research, 2018 - 2022
Tzu-Jui Lin. Supervisors: Karl Stol & Bruce MacDonald
Modern plantation forest procedures still rely heavily on manual data acquisition in the inventory process, limiting the quantity and quality of the collected data. This limitation in collection performance is often due to the difficulty of traversing the plantation forest environment on foot.
Thus, this work presents a UAV system capable of autonomously surveying a plantation forest environment using optimization-based trajectory planning and model predictive control based trajectory tracking. Finally, flight testing in an uncontrolled plantation forest validates the proposed systems in its intended operating environment.
Dynamics and Control of Aerial Vehicles for Prolonged Physical Interaction
PhD Research, 2018-2022
Pedro Mendes. Supervisors: Karl Stol & Jaspreet Dhupia
Aerial manipulation poses complex challenges for aircraft design, model, and control. This research investigates and presents solutions for compliant physical interactions when the coupled dynamics are distinctly different from free-flight conditions. Analytical, numerical, and experimental tools are used to develop aerial vehicles and controllers capable of accommodating these difficulties while maintaining performance and stability. Furthermore, a case study for tree branch manipulation demonstrates the practical feasibility and effectiveness of the designed platform and conceptual framework.
_PNG.png)
Wind Disturbance Rejection on an Over-Actuated Drone using Model Predictive Control
BE(Hons) Research Project, 2022
Caleb Probine & David Yang. Supervisors: Karl Stol & Nicholas Kay
Model Predictive Control makes predictions about the future trajectory of the drone and finds the optimal input to achieve that prediction. This controller differs from others because it can see the physical constraint of the motors (i.e. maximum power they can output) and take that into account when finding the optimal solution.
The objective of this project is to design such a controller for a planar octocopter, and compare it to previously developed control methods.
Human Drone Physical Interaction
BE(Hons) Research Project, 2022
Iris Liu & Suvarna Swaraj. Supervisors: Karl Stol & Salim Al-zubaidi
Physical human drone interaction (PHDI) with underactuated drones has been widely explored due to its diverse applications from providing guidance to the visually impaired to virtual reality gaming. An opportunity exists in exploiting the decoupled translational and rotational dynamics of over-actuated drones for PHDI.
This research aims to improve knowledge about an over-actuated drone's estimation of and response to contact forces during an interaction through tuning parameters of an admittance control architecture.

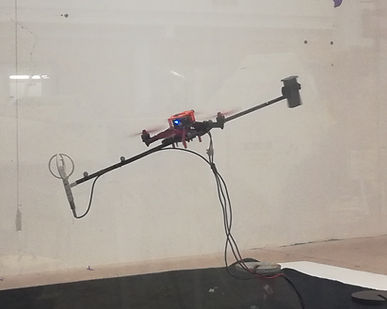
Drone with Tilting-Rotor Configuration

BE(Hons) Research Project, 2022
Joshua Taylor & Matthew Edwards. Supervisors: Karl Stol & Salim Al-zubaidi
The ability to change direction quickly, referred to as agility, is crucial in a number of modern-day drone applications involving interaction and dynamic environments. While research exists on optimising the agility of the more commonly used fixed-tilt drone, improving agility by using variable-tilt drone designs remains unexplored.
This project involves building and testing a variable-tilt drone such that comparisons can be made to the performance of a fixed-tilt drone, in terms of its horizontal agility.
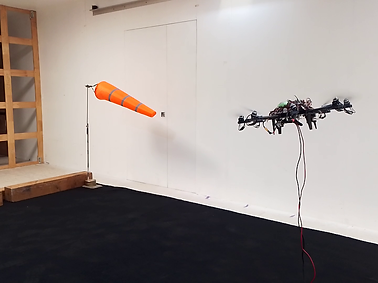
Measuring the Wind from a Drone
BE(Hons) Research Project, 2022
Ivan Rakich & Lynn May. Supervisor: Nicholas Kay
Numerical weather prediction models suffer from a lack of reliable coverage in remote and inaccessible areas. Employing a UAV to gather weather data within these regions could prove to be a low cost solution. However, a UAV is not a fixed platform, and moves in response to the wind which it is trying to measure. Furthermore, downdraft from the rotors adds an extra wind component to the measurements which is not reflective of the environment.
Consequently, this project attempts to measure the local wind vector by mounting an external flow sensor to a UAV. Using the drone’s inertial measurement unit and motion capture feedback, this project aims to produce a data correction methodology to replicate the true flow behaviour.
.jpg)